TED要約:進行状況バーがあなたを正気に保つ方法
marugotoyoten
ヨーテン!
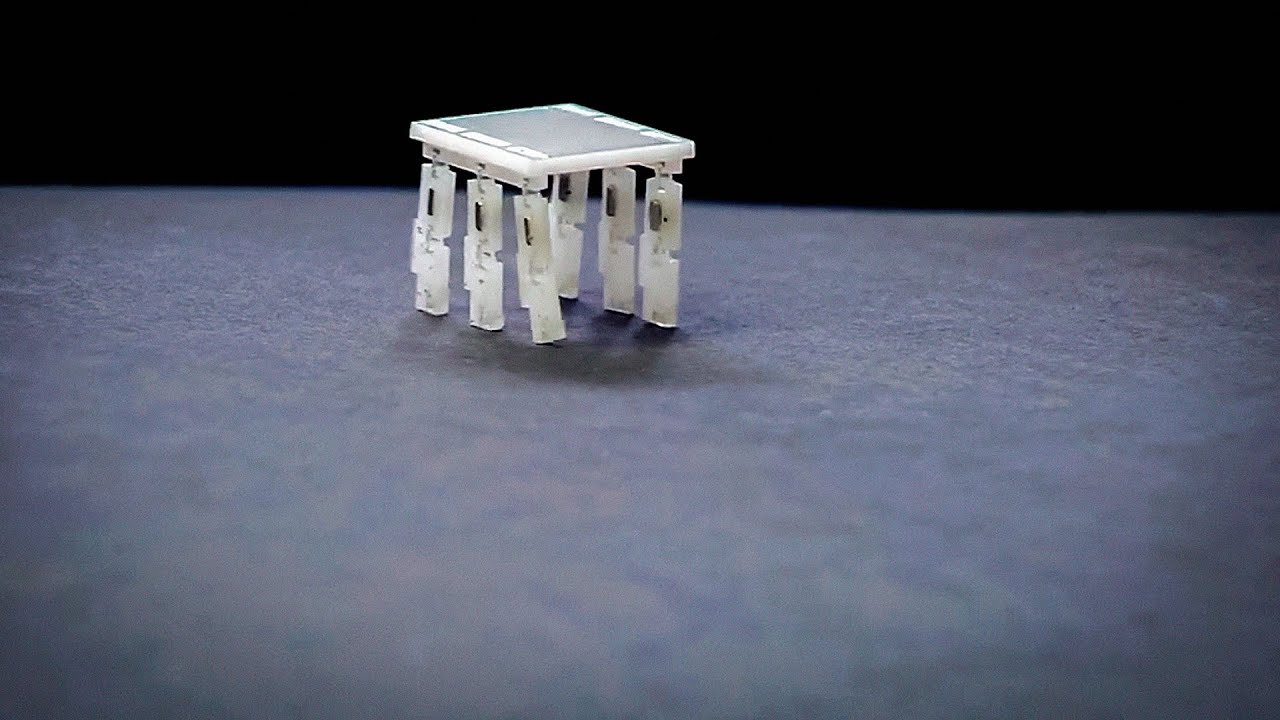
カーネギーメロン大学の機械工学教授であり、以前はメリーランド大学の教授でしたであるサラ・バーグブライターが「私がお米の粒ほどの大きさのロボットを作る理由」について語りました。この動画の要点と要約をまとめました


サラ・バーグブライター
専門分野:マイクロロボティクス
経歴:80倍の高さを飛び越えるマイクロロボットを開発し、その成果は医療や消費電子機器に影響を与えています

微小ロボットのエンジニアリングの課題
私たちは、アリや他の昆虫の能力を模倣した微小ロボットの開発に取り組んでいます。真の課題は、このような小さなスケールでこれらの生物の移動性、パワー、制御を再現することです。中学生でも理解できるように、足や効率的なモーターのような機構、センサー、電力、制御が必要です。さらに、複数のロボットが協力して大きなタスクを達成することを目指しています。
小さなスケールでの移動と運動能力
昆虫は驚異的な移動能力を持ち、困難な地形でも軽快に進むことができます。私たちの微小ロボットでも同様の動きを実現するために、剛性と柔軟性のある材料を機構に組み合わせています。例えば、ロボットを推進するためにエネルギーを蓄えて放出するジャンプ機構を開発しました。バネを圧縮して放出することで、ロボットは自身の長さの約100倍の距離をジャンプすることができます。現在は磁石を使用して移動をシミュレートしていますが、将来的にはモーターをロボットに統合することを目指しています。
昆虫の移動能力の理解
小さなスケールでの昆虫の移動能力の研究は、私たちのロボットの設計を改善する上で重要です。大きな動物の移動については十分な理解がありますが、小さなスケールでは足と地面の間の力が移動により大きな役割を果たします。現在のプロトタイプは完全に機能していませんが、10センチメートル毎秒の速度で走ることができる大きなバージョンもあります。これらのロボットはゴキブリのように障害物を乗り越えることもできます。
応用と将来の可能性
小さなロボットの潜在的な応用は広範で興味深いものです。災害地域での生存者の捜索や橋の安全性の点検などに活用することができます。医療分野では、これらのロボットが血流を泳ぎ回ったり、侵襲的な手術なしで手術を行ったりすることができます。さらに、シロアリが複雑な構造物を建設する方法を模倣することで建築業界を革新することができます。私たちは進展を遂げていますが、まだまだ取り組むべき課題があります。将来、皆さんの中にこの分野に貢献してくれる人がいることを願っています。
▼今回の動画
▼ライターの学び
小さなロボットの開発には、昆虫の能力を再現するための様々な要素が必要です。足やモーターなどの機構、センサーや電力、制御などが必要です。また、複数のロボットが協力して大きなタスクを達成することを目指しています。
小さなロボットの応用は広範囲であり、興奮を覚えます。災害現場での生存者の捜索や橋の安全点検、血液中を泳ぐ医療用途、そしてシロアリのような複雑な構造物の建設など、多くの可能性があります。私たちは進歩を遂げましたが、まだまだ取り組むべき課題があります。将来、皆さんもこの分野に貢献してくれることを願っています。
▼今日からやってみよう
今日から筋トレをはじめてみよう!
運動することで健康的な生活を送れるようになります!