TEDx要約:あなたの才能が発見される人生
marugotoyoten
ヨーテン!
カルロ スフェラッツァが「見えて感じるロボット」について語りました。この動画の要点と要約をまとめました


カルロ スフェラッツァ

タイトル1:人間とロボットにおける触覚の力
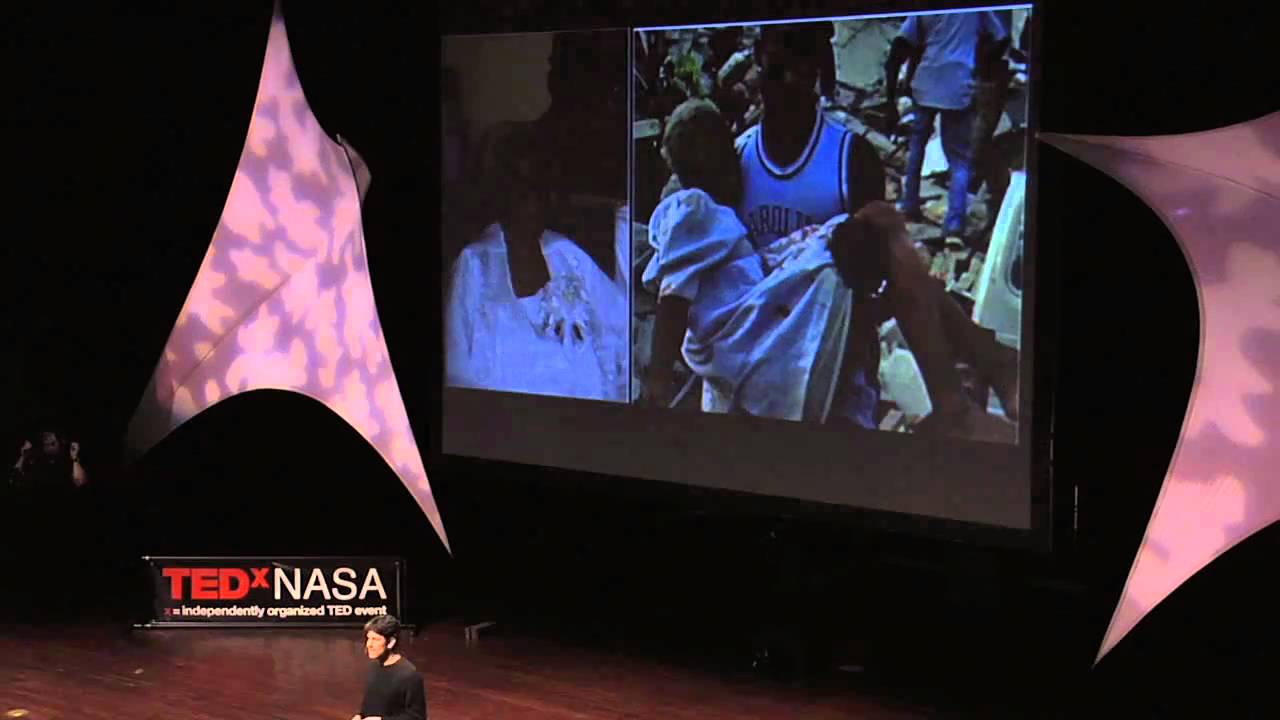
人間が最初に発達する感覚は触覚であることを知っていましたか?人間は触覚を感じる驚くべき能力を持っていますが、ロボットはまだこの領域で苦労しています。ロボットは主に視覚に頼って周囲の世界を理解しています。しかし、最近の実験では、特定のタスクにおいて触覚が重要であることが示されました。例えば、触覚のフィードバックがないと、女性はマッチを打つことに苦労しました。触覚は複雑なタスクや物理的な世界との相互作用において重要です。
タイトル2:接触フィードバックの重要性
私たちの目は周囲の状況を一般的に理解することができますが、触覚の必要性を代替することはできません。触覚は、圧力、温度、湿度、振動、そして痛みに関する重要な情報を私たちの脳に提供します。現在のロボットは、一点での力に関する情報しか提供できない大きな力センサーを使用しています。一方、人間は体全体に数百万もの触覚受容体を持っており、緻密なタスクを実行することができます。ロボットは触覚によってのみ提供される異なる種類のフィードバックが必要です。
タイトル3:簡単で直感的な触覚センシングの原理
ETHZurichでは、ロボットが触覚を感知するための簡単で直感的な方法を開発しました。私たちはカメラと小さなプラスチック粒子を含んだ柔らかい透明なゴム材料を使用しています。力が加わると、材料が変形し、粒子が動きます。カメラはこれらの粒子が作り出すパターンを解析することで、表面の力と変形に関する情報を収集することができます。この触覚センサーは感度が高く、手順も手ごろな価格であり、さまざまな力に関する情報を提供することができます。この原理をロボットの手に実装したり、ロボットの体をカメラで覆ったりすることで、ロボットは本当に器用な触覚を持つことができます。
タイトル4:実用的な応用と潜在的な影響
カメラを使用した触覚センシング技術は、倉庫などのロボットの操作において実用的な応用があります。現在のセンサーはこれらのタスクには十分に信頼性がありません。さらに、触覚の欠如はさまざまな分野でロボットの能力を制限しています。しかし、この技術は義肢の革命や触覚を失った人々の支援に革新をもたらす潜在能力を持っています。人工的な触覚を持つ機械やロボットを作ることで、それらはさまざまな領域でより安全で有用な存在になるでしょう。
▼今回の動画
▼ライターの学び
ロボットにとって触覚は重要であり、視覚だけではなく触覚も開発されるべきだと学びました!
ロボットの触覚の重要性を再認識しました!
▼今日からやってみよう
今日から自分の感覚に意識を向けてみよう!
日常の中で、触れるものや感じるものに意識を向けてみましょう。例えば、食事の際に食材の食感や味わいを感じることや、シャワーを浴びる際に水の温度や流れる感触を感じることなど、自分の感覚に敏感になることでより豊かな経験ができるでしょう。