民主主義とつながりの重要性
marugotoyoten
ヨーテン!
Harvard_univのYoutube動画「未来の外科ロボットに向けての取り組み」について要点と要約をまとめました


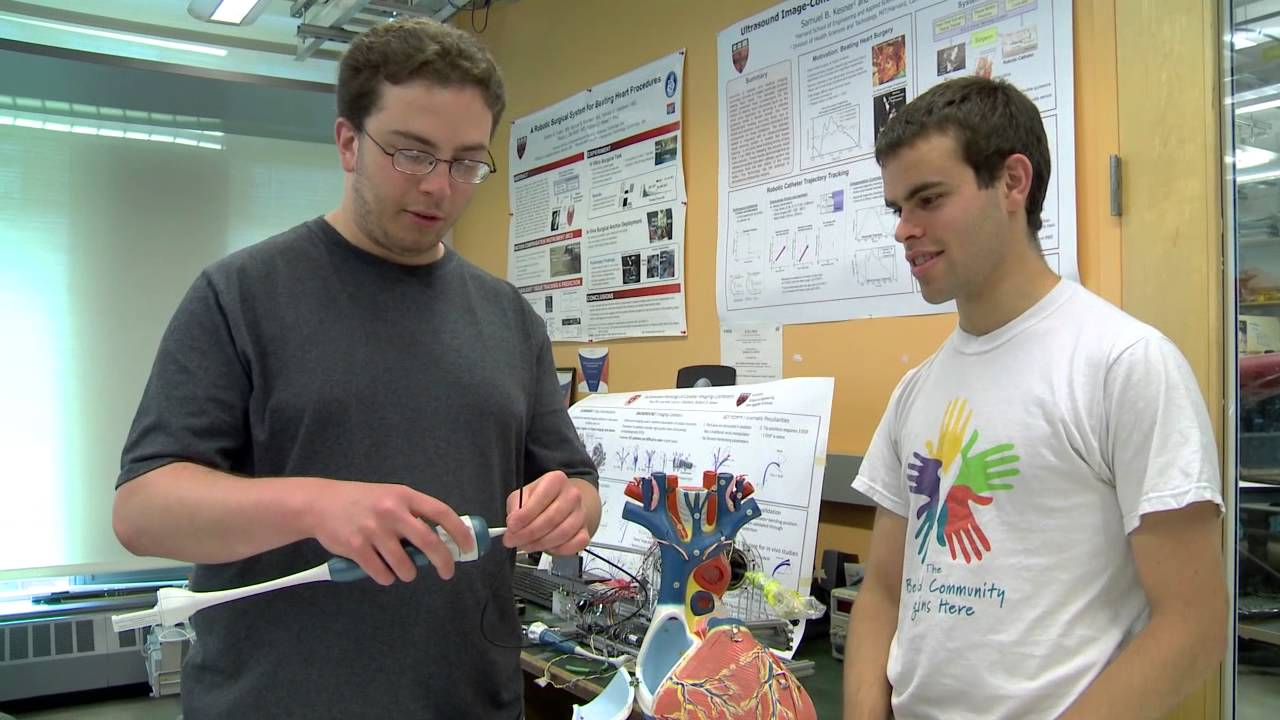
次世代のカテーテルロボットの構築
私は現在、外科ロボットのプロジェクトに取り組んでおり、具体的には心臓手術におけるカテーテルの駆動を行うロボットの開発に焦点を当てています。私の目標は、鼓動する心臓内で複雑な手順を実行できる次世代のカテーテルロボットを作成し、外科医が手順をより効果的に実践できるようにすることです。
柔軟で俊敏な歩行ロボットの開発
私の研究は、ムカデの柔軟性と俊敏性に着想を得た小型歩行ロボットの開発に関わっています。従来の剛体昆虫をモデルにした歩行ロボットとは異なり、私のロボットは柔軟な体と多数の足を持つムカデを模倣するように設計されています。柔軟性をロボットの体に統合し、多数の足を調整して効率的かつ俊敏な動きを実現する方法を研究しています。
統合センシングと駆動技術による医療機器の進化
私は、印刷基板製造に着想を得た先進的な製造技術を使用して、ミリメートルスケールの医療機器に統合センシングと駆動機能を持たせることに焦点を当てています。この技術は、ハーバード大学で開発された飛行ロボット昆虫の製造にも使用されています。私の目標は、この技術を医療分野に応用し、カテーテルや腹腔鏡手術用のツールやデバイスを作成し、外科医の能力を拡張することです。
翻訳研究と協力の影響
ハーバード大学の生物学に着想を得たエンジニアリング研究所であるWyss研究所の一員であることは、翻訳研究に参加する機会を与えてくれます。この協力的な環境では、大学院生、教授、臨床医、産業の専門家が一堂に会し、学術と現実世界の応用を結びつける研究を支援しています。臨床医とのつながりやハーバード医学大学との連携は、専門家から学び、医療手順に対する洞察を得るために非常に貴重な機会を提供しています。
▼今回の動画
▼ライターの学び
私は、医療技術の進化に向けた研究に取り組むことの重要性を学びました。また、協力的な環境での研究は、学術と現実世界の応用を結びつけるために非常に有益であると感じました。
▼今日からやってみよう
今日から、自分の専門分野においても研究や協力を積極的に行い、医療技術の進化に貢献することができます。