TED要約:地域の守護者が地球と人類を守る方法
marugotoyoten
ヨーテン!
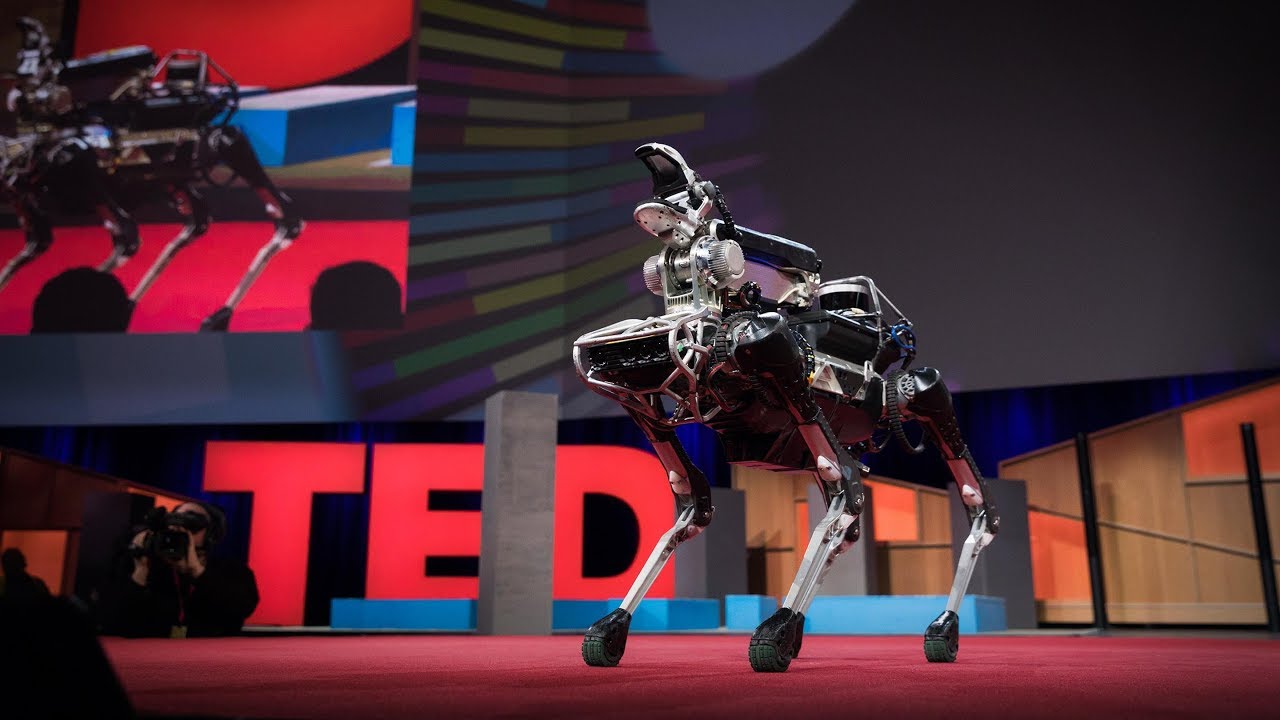
ボストンダイナミクスの創設者であり、元CEO、現在は会長。ボストンダイナミクスはBigDog、Atlas、Spot、Handleなどを作成することで知られるロボティクス企業です。彼は現在、ボストンダイナミクスAI研究所のエグゼクティブディレクターを務めており、ロボティクスと人工知能の最も重要な問題を解決し、エンジニアリングと科学の基礎的な進歩を達成することに焦点を当てています。であるマーク・レイバートが「Spotという名前のロボット犬、走り、跳び、ドアを開けることができる」について語りました。この動画の要点と要約をまとめました


マーク・レイバート
専門分野:ロボティクス、人工知能
経歴:マーク・レイバートはボストンダイナミクスの創設者であり、元CEO、現在は会長です。彼はボストンダイナミクスAI研究所のエグゼクティブディレクターを務めており、ロボティクスと人工知能の分野で重要な問題を解決するために取り組んでいます。また、彼はMITで電気工学とコンピュータサイエンスの教授、カーネギーメロン大学でコンピュータサイエンスとロボティクスの准教授を務めた経験もあります。彼は高度なダイナミックロボットの科学的基盤を確立するのに貢献したレグラボラトリー(1980年)を創設しました。さらに、彼は最初の自己バランス型ホッピングロボットを開発し、ロボティクスの進歩における重要な一歩を踏み出しました。マーク・レイバートは1973年にノースイースタン大学で電気工学の学士号(BSEE)を取得し、1977年にMITで博士号を取得しました。
タスク1:シナリオの作成
導入:人間や動物を模倣するロボットの野望
タスク1:シナリオの作成
開発と進歩:ロボット工学におけるダイナミックな安定化、モービルマニピュレーション、知覚
タスク1:シナリオの作成
デモンストレーション:四足歩行ロボット「スポット」-特徴、機動性、器用さ、知覚
タスク1:シナリオの作成
結論:ロボット工学における将来の応用、機会、倫理的考慮事項
▼今回の動画
▼ライターの学び
ロボットの動きを人間や動物に似せることは驚くべき偉業です!
ロボットの進歩は素晴らしいと思いました!
▼今日からやってみよう
今日からロボット技術の最新動向を学んでみよう!
ロボット技術の進歩は驚くべきものです。最新の動向を学ぶことで、未来の可能性を広げることができます!