TED要約:カラ・E・ヤール・カーン
marugotoyoten
ヨーテン!
スイス・オランダのロボット工学者兼神経科学者であるアウケ・ヤン・アイスペルトが「サラマンダーのように走り、泳ぐロボット」について語りました。この動画の要点と要約をまとめました


アウケ・ヤン・アイスペルト
専門分野:バイオロボティクス
経歴:アウケ・ヤン・アイスペルトは、スイス・オランダのロボット工学者兼神経科学者です。彼はEPFLのバイオエンジニアリング研究所でバイオロボティクスの教授を務め、エンジニアリング学部のバイオロボティクス研究室の責任者でもあります。
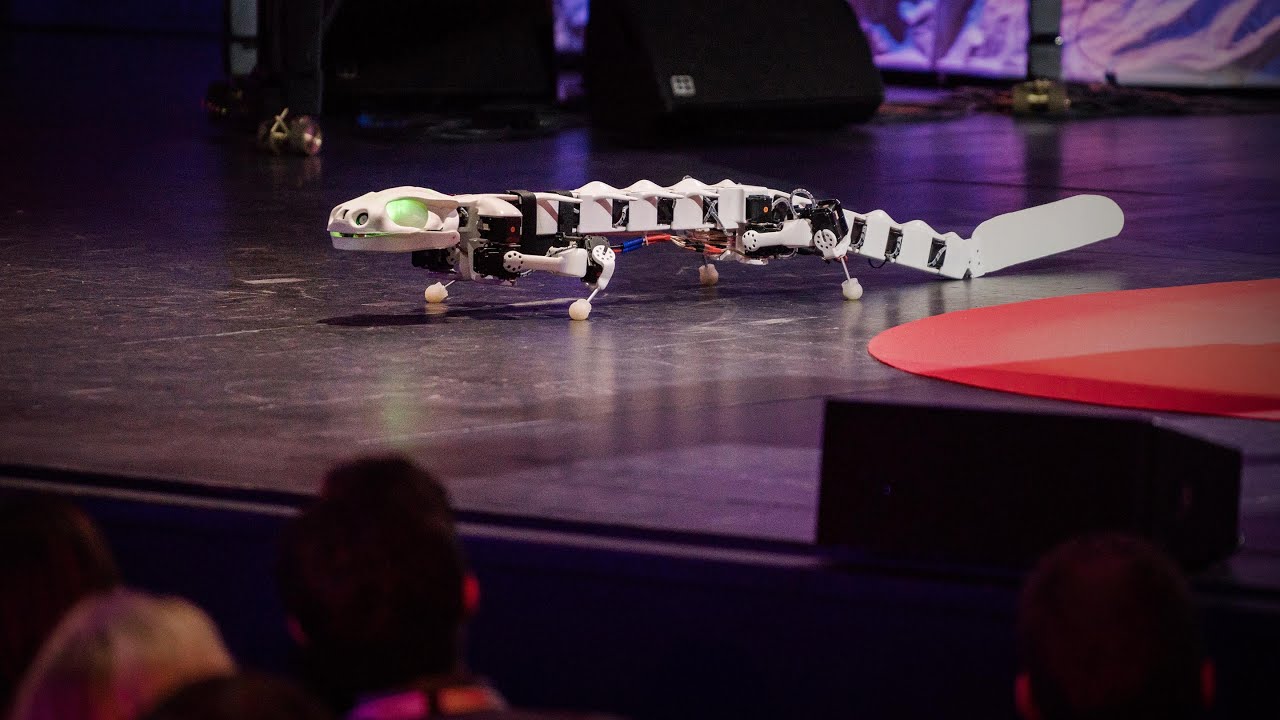
Pleurobot:サンショウウオを模倣したロボット
Pleurobotは、サンショウウオの一種であるPleurodeleswaltlを模倣したロボットです。このロボットは、動物の運動を研究するための科学的なツールとして機能しています。Pleurobotは、約200の筋肉を調整することで動物の運動を再現し、その多様性を捉えることができます。
バイオロボティクス:動物の運動から学ぶ
バイオロボティクスは、動物の運動からインスピレーションを得て、野外サービス、捜索救助活動、野外作業のためのロボットを作成する研究分野です。Pleurobotは、複雑な地形に対応できるロボットを目指しています。サンショウウオは、進化の観点から重要な生物であり、水中と陸上の運動のつながりを提供しています。
Pleurobotの開発とテスト
私たちは神経生物学者と協力して、Pleurobotを開発し、脊髄モデルをテストしました。高度なX線ビデオマシンを使用して詳細なモーションデータを収集し、Pleurobotの構造を最適化しました。さらに、防水スーツも作成し、Pleurobotが泳ぐことができるようにしました。結果として、Pleurobotはほぼサンショウウオの歩行と泳ぎを再現することができます。
脊髄回路のモデル化と運動制御
私たちはサンショウウオの脊髄回路をモデル化し、異なる歩行間の移行を可能にしました。脊髄が電気刺激のレベルを変えるだけで異なる歩行を生成できることは、非常に興味深いです。この運動制御装置は、Pleurobotの研究に大きなインスピレーションを与えており、生物力学がロボット工学と神経科学に貴重な知見を提供していることを強調しています。また、猫の運動についても研究を進めています。
▼今回の動画
▼ライターの学び
サラマンダーの動きを再現するために、Pleurobotの構造を最適化することができました。
動物の運動制御は複雑であり、ロボット工学や神経科学に貴重な知見を提供していると思いました!
▼今日からやってみよう
今日から朝のストレッチをやってみよう!
朝のストレッチは体を目覚めさせ、柔軟性を高める効果があります!